La base de l’étude est le mât type “Tipi” déjà utilisé par F6KFA (radio-club de Reuil-Malmaison)
http://radiof6kfa.free.fr/rep_site_kfa/docs/pylone_portable_04.pdf
Ce petit mât est facile à transporter, rapidement mis en œuvre et est naturellement stable.
Si je ne me trompe, c’est une conception de Joseph F6ICS.
Une première maquette a été montée afin d’évaluer les besoins.
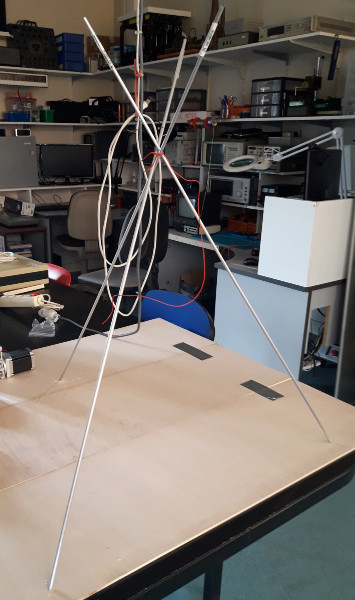
Sur le haut viendra se fixer un plateau, plateau qui recevra le moteur et les antennes.
Nous le poursuivrons dès que nous recevrons nos 3 tubes en aluminium.
En attendant nous avons commencé le concept du rotor d’antenne.
Pour cette partie nous avons repris en partie l’idée développée par Sarcnet (https://sarcnet.org/rotator-mk2.html
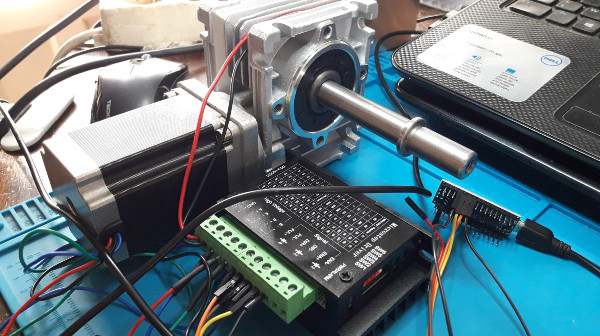
La motorisation sera constituée d’un moteur pas à pas (NEMA23) associé à une boîte réducteur de vitesse à vis sans fin (Ratio 1:25) pour l’azimut.
La partie logiciel le concernant, semble donner satisfaction.
Côté élévation nous avons préféré au moteur pas à pas / réducteur de vitesse, un vérin électrique qu’André avait récupéré.
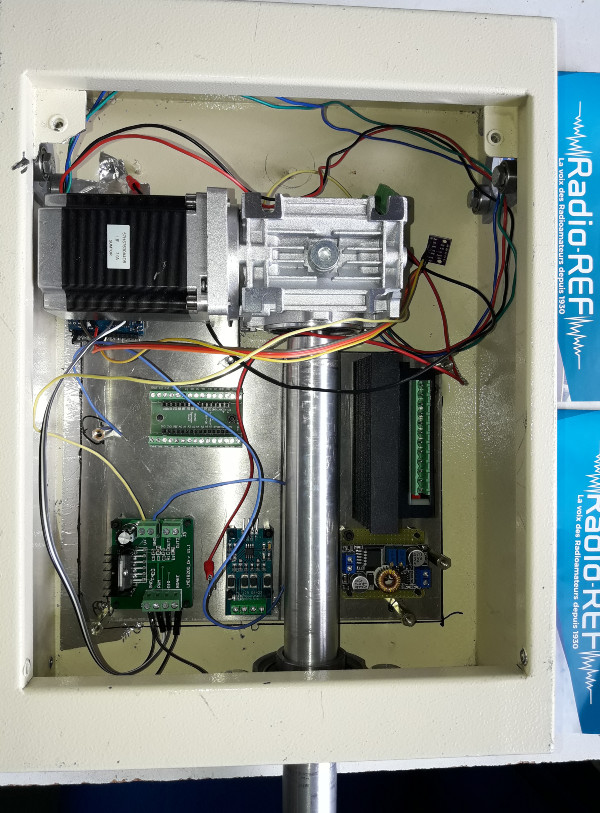
Tout ces éléments de motorisation (mécanique et électronique) sont assemblés également dans un coffret métallique provenant des réserves d’André.
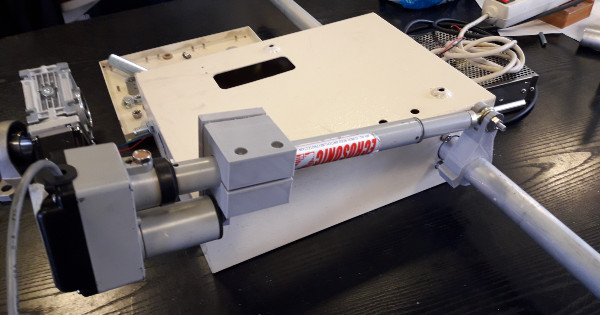
L’arbre de d’élévation est supporté par un palier maison (concept d’André, une plaquette et 3 roulements 606ZZ)
Quelques pièces ont été imprimées en 3D par Freddy.

Des pièces en aluminium ont du être tournées sur le tour d’André.
Pour la petite histoire, le moteur du tour a cramé, une réparation temporaire et de fortune fut faite, afin de pouvoir terminer nos pièces.

Un exemple de pièce tournée par Gilles et André.
Cette pièce étant une adaptation entre l’arbre de sortie du réducteur de vitesse et un tube support en 30 mm.

Côté électronique, il est prévu un Arduino Nano, toutefois si la puissance de calcul ou le nombre d’entrées/sorties n’étaient pas suffisant, nous passerions à un Uno, voir Mega. Pour le moteur pas à pas, un driver et pour le vérin électrique un pont en H viendront compléter la panoplie. Une alimentation de 24V 200W viendra nourrir l’ensemble.
L’idée est notamment de rendre tout ce système reproductible et à un prix le plus abordable possible.
Lorsque cette partie sera achevée et validée, nous ne manquerons pas de réaliser une description sur notre site.
Cette réalisation est le résultat de la collaboration de Gilles F1NVW, André F1HVB et de Freddy ON6FS
